
[box type=”note”]이제 로봇은 공상과학영화 속에서만 머물러 있지 않습니다. 현실 속으로 성큼 다가온 로봇. ‘로보틱스 서포트베이’에서 흥미로운 로봇 원리와 로봇 뉴스를 독자에게 전합니다. (편집자) [/box]
영화 아이언맨 보셨나요? 슈퍼맨, 배트맨, 스파이더맨의 대를 잇는 하이테크 슈퍼갑부 히어로 아이언맨! 주인공 토니 스타크가 재벌이어서 인기가 많은 것인지, 아니면 미중년에 싸움(?)까지 잘해서 인기가 많은지는 모르겠지만 (분명 연구를 잘해서는 아닐겁니다. ㅎㅎ) 최첨단 웨어러블 테크놀로지를 갖춘 이 영웅에 어른, 아이 할 것 없이 많은 사람이 열광했었죠. 컴퓨터의 발전도 좋고 모바일의 발전도 좋지만 가장 신나는 건 역시 나 자신이 킹왕짱이 되는 것 아니겠습니까?
최근 웨어러블 시장이 급속히 팽창하고 있습니다. 핏빗, 조본의 업, 나이키의 퓨얼밴드 등 피트니스 웨어러블 기기는 이미 한 가지의 제품군으로서 자리를 잡아가는 모습이고, 삼성의 기어, (아직 소문만 무성한) 애플의 아이워치 역시 스마트 워치로서 모바일과의 융합을 통해 새로운 미래시장을 꿈꾸고 있죠.
하지만 진정한 웨어러블이라면 역시 아이언맨 아니겠습니까? 몸에 착용하여 신체적 능력을 향상시키는 진정한 아이언맨! 좀 더 전문적인 용어로는 근력보조용 외골격로봇 (Power-assist exoskeleton, 이하 외골격로봇)! 오늘은 외골격로봇의 탄생과 여기에 존재하는 기술적 난제들, 그리고 외골격 로봇의 미래에 대해 짚어보도록 하겠습니다.
사람의 두뇌 + 기계의 파워 = 짱짱맨

로봇들이 움직이는 모습을 실제로 보신 적 있으신가요? 전시회장 등에서 로봇의 모습을 보면 그 화려한 모습에 ‘우와!’ 싶으면서도 한편으론 무언가 짜고 치는 고스톱 같은 느낌을 씻기 어려웠을 텐데요, 전시장에선 날고 기던 로봇들이 아직 실생활에 다가오지 못한 것은 바로 로봇의 인공지능이 예측불허의 현실 세계를 헤쳐나가기엔 많이 부족하기 때문이지요. 로봇은 사람보다 더 큰 힘을 낼 수 있고, 더 빠르게 움직일 수 있고, 더 정교한 작업을 할 수 있지만, 복잡한 환경과 다이나믹하게 변화하는 상황에 대처하는 능력은 아직 인간에 한참 못 미친답니다.
이러한 맥락에서 외골격로봇(exoskeleton 또는 wearable robot)은 인간의 지적 능력과 로봇의 기계적 능력을 결합하겠다는 매우 쌈빡한 아이디어를 가지고 탄생하였습니다. 상상해 보십시오. 머리가 좋은 김박사, 못생긴 얼굴에 약골로 태어나 동네 형들에게 괴롭힘만 당합니다. 하지만 열공 또 열공한 끝에 착용로봇을 개발, 결국 물리적 강력함까지 갖춰 짱짱맨으로 거듭난다면, 이것이야말로 로봇계의 신데렐라 아니겠습니까? 인간의 두뇌만큼 뛰어난 인공지능은 개발할 수 없다며 술로 밤을 지새우던 연구자들은 인간의 지능과 기계의 힘을 결합하는 외골격로봇의 장밋빛 미래에 환호하며 아이언맨의 부푼 꿈을 꾸기 시작했습니다.

처음엔 ‘사람과 결합한다’는 점이 로봇에게 큰 장점을 가져다줄 것 같았지만, 이내 단점들이 더욱 부각되었습니다. 무엇보다 가장 큰 이슈는 바로 안전이었죠. 착용로봇은 그 어떤 로봇보다 인간과 밀착하여 운용되기 때문에 조그만 오동작도 착용자의 큰 상해로 이어질 수 있습니다. 로봇은 가끔 (사실 아주 종종) 원치 않게 폭주하는 경우가 발생합니다.
여담이지만 로봇공학자들은 혹 몸값 비싼 로봇님께서 다치시기라도 할까 봐 항상 노심초사한답니다.. 바닥에 넘어지려는 로봇을 위해 슬라이딩으로 몸빵 쿠션이 되어주기도 하죠. 내 몸뚱어리야 자연 치유 능력이 있다지만 한번 망가진 로봇을 고치려면 그 후폭풍은… 이렇게 일반 로봇도 오류로 인해 예측불허의 폭주를 하는 경우가 많은데, 하물며 인간과 결합한 착용로봇이 만약에라도 팔꿈치를 반대방향으로 꺾기라도 한다면… 휴… 너무 소름 끼치네요.
외골격로봇의 기술적 이슈들
모든 로봇이 그렇지만 외골격로봇 역시 기계 / 전기 / 소프트웨어가 어우러지는 현대기술의 총아입니다. 특히 외골격로봇은 여기에 ‘사람’이라는 요소가 추가되기 때문에 사람과 로봇의 상호작용 (Human-Robot Interaction, HRI) 역시 매우 이슈로 다루어지지요. 외골격로봇을 이루는 기술들을 기계적 / 전기적 / 소프트웨어적 측면으로 나누어 살펴보자면 다음과 같습니다.

이제는 고전이 되어버린 버클리 대학의 BLEEX (2004년, 좌측)와 워싱턴 대학의 7자유도 상지 외골격로봇 (2006년, 우측). 이들은 현대식 하지/상지 외골격로봇의 시초격이 된 로봇으로서 많은 외골격로봇들의 좋은 가이드라인이 되어주었다. 참고로 Bleex는 고출력을 위하여 유압식 동력원을 채택했으며, 7자유도 상지로봇은 무게 경감을 위하여 줄 구동방식(wire-driven)을 채택하였다.
기계적 측면 : 인체를 고려한 디자인
외골격로봇은 기본적으로 사람이 ‘입고’ 움직이는 로봇입니다. 그것도 우리가 평상시 입고 다니는 옷에 비하면 매우 무거운 착용물이지요. 따라서 인체와 결합했을 때 필연적으로 나타나는 불편함을 어떻게 극복하느냐가 외골격로봇 설계에 있어 매우 중요한 화두입니다. 여기엔 인체공학(ergonomics)과 운동학(kinesiology)에 대한 이해가 필수적입니다.
사람은 생각보다 많은 자유도를 가지고 있습니다. 종종 7자유도라고 여겨지는 팔만 자세히 살펴보더라도 사실은 어깨의 회전축 자체를 움직이는 자유도가 따로 존재하며, 각 관절 역시 완벽한 고정축 회전이 아닌 회전과 약간의 병진 운동이 함께 이루어지는 구조이지요. 류현진 선수가 야구공을 던지는 모습을 슬로우모션으로 돌려보세요. 그럼 팔이 탄력적으로 휘기도 하고 어깨가 살짝 빠지기도 하는 등 사실은 매우 복잡한 움직임이라는 것을 아실 수 있을 것입니다. 따라서 이렇게 복잡한 사람의 모션을 완벽히 추종하는 딱딱한 옷(외골격)을 만들기란 말처럼 쉬운 일이 아니죠.
전기적 측면 : 배터리 그리고 액추에이터
로봇을 개발하면 지긋지긋하게 따라다니는 문제가 바로 배터리와 액추에이터의 성능 문제입니다. (어디 로봇 구경하러 가시면 ‘이거 배터리랑 액추에이터 성능은 충분한가요?’라고 물어보세요. 다들 아마 정곡을 찔린 듯 아파하실 거예요) 아이폰 쓰시는 분들, 그 조그만 기기도 배터리가 오래가지 않아 고생 많으시죠? 하물며 아이폰도 그런데 저 큰 파워를 내는 로봇은 어떻겠어요!
외골격로봇은 사람이 착용하고 걸어 다녀야 해 배터리 역시 가벼워야 하는데, 가볍고 성능 좋은 배터리를 만드는 기술이 참 쉽지가 않습니다. 이는 전기가 아닌 유압으로 움직이는 외골격로봇도 마찬가지여서 유압 동력원을 이용하기 위해선 착용자가 무거운 유압펌프를 등에 짊어지고 다녀야 한다는 단점이 있습니다.
또 한가지 이슈는 바로 액추에이터입니다. 지난 휴머노이드에 관한 글에서도 일본의 휴머노이드 기업 SCHAFT가 액추에이터 기술을 획기적으로 개선함으로써 휴머노이드의 신기원을 이룰 수 있었다고 말씀드렸는데요, 외골격로봇 역시 가볍고 성능 좋은 액추에이터 개발이 시급한 곳 중 하나입니다. 휴머노이드의 경우와 마찬가지로 발열 문제는 외골격로봇 액추에이터에서도 해결하기 어려운 문제입니다. 특히 외골격로봇은 사람 바로 곁에서 액추에이터가 작동하기 때문에 발열 문제를 더 큰 폭으로 개선해야 하죠.
[box type=”info”]
http://www.youtube.com/watch?v=tVIE33tMyQM
2010년 발표된 Raytheon사의 전신 외골격로봇 XOS2. 이 로봇은 유압 구동원을 사용하여 80kg의 무게를 거뜬히 들어 올립니다. 하지만 XOS2는 등에 유압구동원을 공급해주는 케이블을 달고 다니는데요, 즉 유압 펌프 들고 누군가 쫓아다니지 않는 한 외골격로봇을 입고 자유롭게 돌아다닐 수는 없다는 것이죠. 배터리와 액추에이터 문제는 정말 로봇 개발 평생의 적이네요.[/box]
소프트웨어적 측면 : 로봇-인간 상호작용, HRI
외골격로봇 기술의 꽃은 바로 이 HRI (Human-Robot Interaction) 기술에 있습니다. 우리는 컴퓨터를 조작할 때 주로 키보드와 마우스를 가지고 컴퓨터와 명령을 주고받는데요, 착용로봇을 입고 키보드와 마우스를 칠 수는 없는 노릇이죠. 결국은 착용자가 움직이고자 하는 동작의도를 로봇 스스로 파악해 움직여야 주어야 하는데요, 이 기술이 ‘얼마나 부드럽게 움직이는 외골격로봇을 만드느냐’의 핵심이라 할 수 있겠습니다.
동작의도는 주로 외골격로봇 곳곳에 붙어있는 센서를 통해 파악하는데, 신호는 크게 사후 신호와 사전 신호로 나눌 수 있습니다. 먼저 사후 신호는 동작이 발생한 이후에 측정이 가능한 신호로 위치센서, 속도센서, 힘센서 등이 여기에 해당합니다. 예를 들면 팔 끝에 힘센서를 달아 착용자가 살짝 밀려고 하면 그 의도를 파악하여 로봇이 같은 방향으로 움직여주는 거죠. 사후 신호는 설치와 측정이 간편한 반면, 움직인 후에야 측정이 가능하기 때문에 장애인과 같이 움직이는 힘이 매우 약한 분들은 그 동작의도를 파악하기 힘들다는 단점이 있습니다. 또한, 움직인 후에 반응할 수 있기 때문에 ‘로봇이 좀 늦게 반응하네?’라는 저항감을 받을 수 있죠.
반면 사전 신호는 동작이 발생하기 전 신체에서 발생하는 신호를 말합니다. 대표적인 신호로는 근육에서 발생하는 근전도(Electromyography, EMG) 신호를 들 수 있는데요, 근전도 신호는 동작이 발생하기 약 0.1초 전 활성화되기 때문에 사람이 움직이기 전 로봇이 ‘알아서’ 움직일 수 있다는 장점이 있지요. 이러한 근전도신호는 사고로 팔이 절단되었으나 근육 신호가 살아있는 환자들을 위한 로봇 의수를 개발에도 매우 유용하게 쓰이고 있답니다.
[box type=”info”]
https://www.youtube.com/watch?v=pxEGiMhqiv8
최근 DEKA사가 개발한 로봇의수인 DEKA Arm이 미국 FDA의 의료기기 승인을 통과하여 곧 시장 출시를 앞두고 있다는 소식이 전해졌습니다. DEKA Arm은 팔이 절단된 환자의 어깨 부위로부터 근전도 신호를 측정, 분석하여 움직이는 로봇의수로서, DEKA Arm 출시 소식에 국내 네티즌들은 “와, 빨리 국내에도 출시되었으면 좋겠다.” “헐 대박인데” 등의 반응을 보였을지 말았을지는 저야 잘 모르겠습니다…[/box]
외골격로봇의 미래. 아이언맨 혹은 걷는 휠체어를 꿈꾸다
앞서 말씀드린 기술적 이슈들이 조금씩 해결되어 가며 최근에는 다양한 형태의 외골격로봇들이 모습을 선보이고 있습니다. 특히 센서 기술과 기계학습(machine learning) 기술의 발달은 급속한 HRI 기술의 발전을 가져왔죠. 보행보조용 외골격로봇의 대표격인 Ekso Bionics의 착용로봇, Ekso는 최근 2억 6백만 달러, 한화로 약 214억 원에 이르는 투자금을 모집하며 시장에 그 가능성을 검증받았고, (외골격로봇은 아니지만) 로봇의수인 DEKA Arm은 미국 FDA 승인을 통과하였다고 하니 사고로 팔, 다리가 불편하긴 분들이 로봇의 도움을 받아 그 기능을 회복할 수 있는 날도 그리 멀지 않은 것 같습니다.
[box type=”info”]
Ekso Bionics의 전신 Berkeley Bionics에서 2010년 공개한 eLEGS. 사고로 더는 걷지 못하던 장애인이 eLEGS의 도움을 통해 처음으로 보행에 성공하는 모습은 많은 이들에게 큰 감동을 자아냈었습니다. 이것이 감성마케팅인가봉가…[/box]
외골격로봇의 출현이 가장 환영받는 분야는 역시 의료계입니다. 국내에서는 100만 명 당 약 20~50명의 척추 손상 환자가 발생하는데 이들 중 상당수가 팔 또는 다리의 운동능력 상실을 경험하고 있습니다. 따라서 외골격 로봇이 개발된다면 많은 분이 이 로봇의 도움을 받아 그 기능을 조금이나마 회복할 수 있을 것으로 보입니다.
실제 환자를 만나보면 단순히 일어서서 일반인과 같은 높이에서 눈을 맞출 수 있다는 것만으로도, 포기하고 있던 팔 한쪽으로 숟가락질을 할 수 있다는 것만으로도 너무나 큰 행복을 느끼고 있었습니다. 그리고 잃어버린 팔, 다리의 기능을 회복할 수만 있다면 큰돈을 지불할 용의가 있다는 환자의 의견을 들어볼 때 근력보조를 위한 외골격로봇의 시장은 분명 밝은 미래를 가지고 있는 것으로 보입니다.
외골격로봇은 환자의 재활운동에도 유용하게 사용될 수 있습니다. 근력보조용 외골격로봇은 착용자가 힘을 적게 들여도 되도록 도와주는 기능인 반면, 재활용 외골격로봇은 반대로 운동을 위해 근육에 부하를 가해주는 개념입니다. 쉽게 말해, 입고 있는 헬스기구라고 생각하면 되겠네요. 현재는 이러한 환자들을 위한 재활운동이 물리치료사와 같은 분들의 도움을 받아 이루어지고 있는데요, 노동집약적인 재활 분야가 외골격로봇의 등장으로 인해 상당 부분 자동화될 수 있을 것으로 보입니다. 특히 재활로봇은 근력보조로봇에 비해 HRI 구성이 쉬워 좀 더 가까운 시간에 다양한 제품들이 나올 수 있을 것으로 보입니다.
[box type=”info”]
http://www.youtube.com/watch?v=JcR4yiv-h6k
미 군수산업의 선두주자 중 하나인 Lockheed Martin사는 Bleex의 기술을 이어받아 병사용 외골격로봇인 HULC를 공개하였습니다 (2009). 군장 한 번 매 본 한국 남자들은 아시겠지만 40~50kg의 군장을 메고 몇십 km를 걷다 보면 정말 삶에 대한 회의가 느껴질 정도인데요, HULC는 외골격로봇을 통해 병사들이 90kg의 군장까지도 가볍게 짊어질 수 있도록 도와줍니다. (근데 뭐… 우리가 기술이 부족해서 삽으로 땅 팠나? 그냥 인력으로 때우는거지…ㅠㅠ)[/box]
국방분야에서도 외골격로봇은 매우 유용하게 쓰일 것으로 보입니다. 사실 로봇 분야에서 가장 시장성이 큰 분야가 바로 의료와 국방 분야입니다. (최근에는 공장자동화 분야까지도…) 2000년대 초반까지만 하더라도 서비스 로봇이 대세를 이룰 듯 보였는데요, 막상 시장에 내놓고 보니 아무도 그 비싼 돈을 들여 서비스 로봇을 가정이나 업소에 들이려 하지 않았죠.
하지만 의료와 국방 분야는 달랐습니다. 의료계는 더 정밀한 수술을 위해 3D 영상, 원격 시술 등의 로봇기술을 필요로 하였고, 가정과는 달리 예측할 수 있게 구조화된 수술실 내의 환경은 로봇이 진출할 기술적 장벽도 낮춰주었기에 의료계는 많은 로봇기술을 받아들일 수 있었죠. 또한, 성능만 좋다면 몇조 원의 돈도 집행하는 국방 분야 역시 인명피해 없이 정찰, 전투를 수행할 수 있는 로봇 기술에 큰 시장성을 보여주었습니다. 국방 분야는 외골격로봇의 도입에도 적극적이어서 차량이 다니지 못하는 전투지역에 외골격로봇의 도움을 받아 군수물자를 운송할 목적으로 외골격로봇을 개발, 도입하고 있습니다.
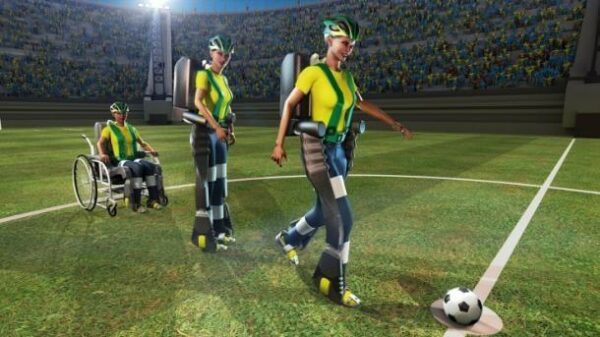
요즘 날씨가 매우 좋습니다. 왜 갑자기 날씨 얘기냐고요? 그냥 요즘엔 넓은 하늘과 푸른 잔디를 가르며 힘차게 땅을 내딛는 그 느낌이 너무 좋고 행복하더라고요^^ 하지만 세상에는 그 당연한 행복조차도 누리지 못하고 사시는 분들이 참 많습니다. 로봇 기술이 세상을 위해 기여해야 할 일들이 참 많이 있지만, 그중 하나가 바로 이렇게 ‘당연한 행복’을 누리지 못하는 분들께 그 행복을 찾아드리는 일이 아닐까 싶습니다. 외골격로봇 기술은 이러한 행복을 위해 무던히도 달려가고 있습니다. 사람들이 현재 새로운 아이폰, 새로운 갤럭시의 출시에 환호하듯 머지않은 미래에는 장애인, 노인분들이 “새로 나온 외골격로봇 봤어? 그거 입으면 이제 축구도 할 수 있다는데?”라며 기뻐하는 모습을 볼 수 있었으면 좋겠습니다. 외골격로봇 화이팅!
[divide]
이 글은 필자의 블로그인 T-Robotics (t-robotics.blogspot.kr)에도 실렸습니다. 글의 표제와 본문은 슬로우뉴스 편집원칙에 따라 일부 수정, 보충했습니다. (편집자)



[필자] 안녕하세요 로보틱스 서포트베이 필자입니다. 매월 한 개씩 연재를 올리려고 했는데 너무 늦었네요. 죄송합니다ㅠ
이번 글은 아이언맨 로봇 기술로 유명한 exoskeleton 기술입니다. 사실 여러분들께서 영화에서 보는 기술 중 많은 기술들은 실제 연구가 이루어지고 있는 기술들이랍니다. 기술을 모르고 보면 그저 SF일 뿐이겠지만, 알고 보신다면 미래에 대한 insight를 덤으로 얻으실 수 있겠죠? 아무쪼록 이 연재를 통해 로봇기술과 좀더 친근해지셨으면 하는 바람입니다.
혹시 다루었으면 하는 주제가 있으시면 의견 부탁드리겠습니다. 비록 만물을 꿰뚫고 있지는 못하나(ㅠㅠ) 아는 바에서 + 열심히 공부하여서 재밌는 글 쓰도록 노력하겠습니다. 제 글은 T-Robotics : Robot & Math에서도 follow 하실 수 있으니 이 페이지도 많은 Like 부탁드리겠습니다~ 감사합니다
좋은 글 잘 보고 있습니다. 별다른 댓가도 지불하지 않고 이렇게 좋은 글을 봐도 되나 죄송하기만 합니다. 초등생인 제 아들이 로봇에 관심이 많아 그쪽으로 적성을 발전시켜주고 싶었는데 시중의 로봇학원들에 좀 다녀봤지만 골격짜고 만들고 동작시키는 단계까지는 좋아하는데 베이직으로 짜는 프로그램에 들어가면 딱 흥미를 잃어버려서 비싼 가격을 주고 구입한 로봇이 그냥 책장 구석에 서있습니다. 레고 마인드스톰은 GUI인 것 같아서 이걸 시켜보면 좀 좋으려나 고민중인데 그것도 그냥 장난감에 머무를까 싶어 주저하고 있습니다. 프로그래밍에 관심을 가지도록 해야 할 것 같아서 스크래치나 아두이노를 개인적으로 조금 가르쳐봤는데 지방도시라서 딱히 교육해주는 곳도 없고 또 제가 이공계도 아니라서 가르치는 데도 한계가 있네요. 어떻게 꾸준히 적성을 발전시켜주면 좋을지 ‘로봇 교육’을 주제로 글을 써주시면 저뿐 아니라 많은 사람들에게 큰 도움이 될 것 같습니다. 부탁드립니다.
우와 교육을 참 멋지게 해주시네요 아드님은 참 행복하겠습니다^^
네 안녕하세요 ^^ 저도 사실 교육에 대해선 ‘이렇게 하는 것이 좋습니다’라고 말씀드리기가 참 쉽질 않습니다ㅠ 특히 로봇은 기계공학, 컴퓨터공학, 전기공학, 뇌신경공학 등 매우 다양한 분야가 합쳐져 있는 분야이기에 ‘로봇을 배운다’라기보단 앞에 거론한 세부분야 중 하나를 배우는 것이 로봇공학에 이르는 정도인 것 같습니다. (무작정 로봇을 조립해보고 움직여보는 것이 능사는 아니지요.)
제 개인적으로는 만약 제 아이가 로봇을 하고 싶다면 저는 로봇공부를 시키는 것보다 수학이나 물리, 생물과 같은 기초 과학을 탄탄히 해줄 것 같습니다. 로봇을 그저 취미로만 머무르지 않을 것이라면 결국 업으로 삼는 무기가 되는 것은 바로 수학과 과학이기 때문이지요. 만약 그러면서 아이가 코딩에 흥미를 붙일 수 있다면 금상첨화일 것 같습니다.
로봇교육에 대해 ‘감히’ 이야기 하는 것은 로봇 전반에 대한 큰 그림을 다루는 이야기인지라 참 조심스럽습니다. 올해 내로 로봇교육에 대한 제 개인적인 생각을 담아 글을 써보도록 하겠습니다. 소중한 댓글 감사합니다.
정말 좋은 글 감사합니다.